

2-dim. Positioning and Identification Antenna with CAN / CANopen® / soon Profinet®
Overview
- Transponder antenna for Automated Guided Vehicles (AGV)
- Flat casing, sealed electronics
- Indoor & outdoor, IP 64
- Mounting directly on or flush with metal
- Reading distance 20 to 80 mm, nominal reading distance 50 mm
- Active area for positioning 200 mm x 200 mm
- Max. crossing speed 4 m/s
- Voltage supply 18 - 36 V, current consumption max. 1 A when programming transponders, typically 300 mA @ 24 V
- Connectors: 3 x M12 5 pin, A coded: 1x Power (incl. serial RS 232 + PosiPulse) / 2x CAN
- CAN module according to CAN specification V2.0 part B, standard / extended frames or CANopen®
- Profinet® in preparation
- PosiPulse when crossing the middle axis in direction of travel, 24 V 20 mA power source, not isolated
- Serial interface either usable as service interface for the configuration (default, also for firmware updates) or data interface (telegram contents can be configured)
- Programming of Transponders
The antenna is used for the localization and track guidance of automated guided vehicles (AGV) or cranes. All settings, calibrations and software updates necessary for the operation of the antenna can be conducted via a serial interface or CAN/CANopen®.
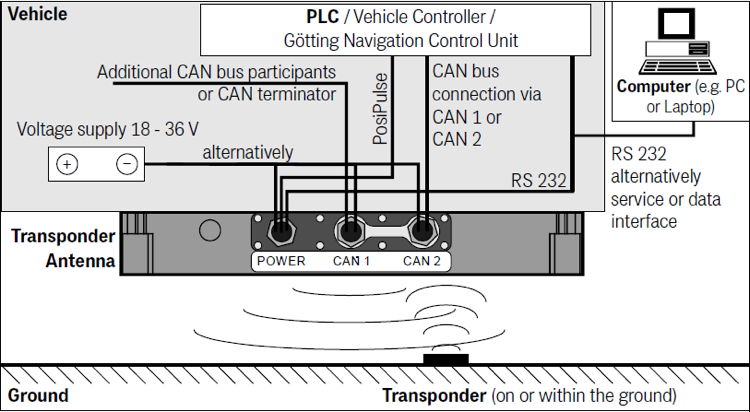
Example: Connection Plan
Functional Description
As soon as a transponder is within the reading area of the antenna the antenna contactlessly induces energy into the transponder which in turn with this energy starts transmitting its code cyclically every 8 ms. Otherwise the transponder is totally passive and doesn‘t need an energy supply or battery of its own. At any given time there may only be at most one transponder within the reading area of the antenna.

Photo of the antenna with Transponders HW DEV00095 (flat) and HG G-71325 (bar)
The transponder field is rotation-symmetric, thus the orientation and bearing of the vehicle can not be calculated based on a single measurement. In order to calculate the orientation a series of transponders has to be read or a second antenna has to be used. With a second antenna it is also possible to calculate the orientation during standstill and to navigate omnidirectional vehicles.
The interpreter that determines the code and the position is integrated into the antenna. When the Y axis is crossed a high-precision positioning pulse is output with a configurable duration.The positioning pulse is available as a digital output as well as via the telegrams of the serial and CAN bus interfaces.
Related Components
Transponder HG G-71325
Transponder HW DEV00095
Transponder programming device HG G-81840
Control Unit HG G-73650
Downloads
| Attachment | Filesize – | Uploaded |
|---|---|---|
| 452.31 KB | 29.08.2022 | |
| 5.05 MB | 29.08.2022 | |
| 665.25 KB | 23.06.2021 | |
| 13.1 KB | 12.12.2016 |