

Navigation Controller
The Navigation Controller is used for the track guidance of Automated Guided Vehicles (AGV) along virtual tracks. It has the following tasks:
- Determination of the current position via transponder, GPS or external systems.
- Reconstruction of the route to be driven (by means of segment files).
- Track guidance (navigating the vehicle along the track).

Example Vehicles
Suitable and Unsuitable Vehicle Types
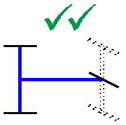
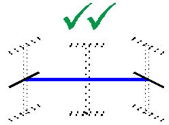
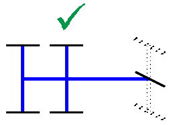
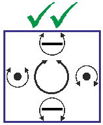
Particularly suitable are all vehicles that operate predictably and reproducibly. Several non-steered axles, trailers or vehicles with a center pivot steering are not suitable. The wheel slippage has to be low and the wheels should be hard to minimize friction.
 |
 |
 |
 |
|
|
|
|
Suitable vehicle types
Interfaces |
|||
|---|---|---|---|
| Label | Function | Label | Function |
| ETH | RJ 45, Ethernet | SIO 3 | RS 232, not used |
| USB | USB 1.1, Type A (logging on a memory stick) & Type B (firmware update) not usable at the same time |
IO | 3x inputs switching threshold 0 – 24 V, Transponder antennas 1x output 0 – +Ub, emergency stop |
| SIO 1 | RS 232, communication with internal GPS receiver (optional) | ENCODER 1/2 |
Switching threshold 0 – 24 V, connection for incremental encoders |
| SIO 2 | RS 232, configuration of the Ethernet interface | PROG | Only for Götting internal use |
| CAN 1 | CAN bus 1, CAN spec. V2.0 part B, connection of Götting devices (e.g. gyro) | ANT 1/2 | With option GPS: 2 x TNC for GPS antennas Otherwise dummy plugs |
| CAN 2 | CAN bus 2, CAN spec. V2.0 part B, connection of third party devices | Feldbus module | Optional extension module Profinet (HG G-61431ZA) / Profibus (HG G-61431YA) |
Interfaces of the navigation controller
Position Determination with Sensor Fusion
The position determination is carried out by an internal sensor fusion of transponders and/or GPS and an odometry. Alternatively the position can be provided externally (e.g. Laser Scanner HG G-43600). The odometry can be improved by using the Gyro HG G-84300.
The sensor fusion calculates the position and the heading of the vehicle. It then provides the Navigation Controller a data set with the following content (the so-called Pose):
X-Position / Y-Position / Speed / Vehicle direction
Navigation along Virtual Tracks
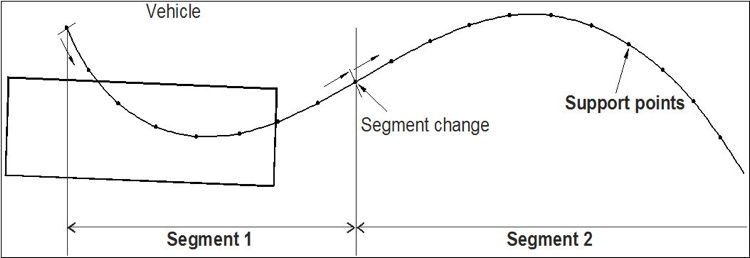
Sketch: Layout of a track with segments and points
The Navigation Controller needs information regarding the vehicle geometry and a segment file for the track. The segments define sections of a course. Segments do not take real parts of a site into account but are defined virtually via a GöttingPlug-In for the CAD program Malz++Kassner CAD 6 to best match the vehicle abilities and the site conditions. Each segment consists of a minimum of 4 support points. The Navigation Controller uses the support points to calculate a virtual route for the defined vehicle. Existing tracks (segmente.csv, see example file in the downloads below) may be edited comfortably online in the Götting Track Editor.

For each support point it is possible to define the speed the vehicle is to drive. The Navigation Controller interpolates linearly, so that a smooth speed profile is used. Additionally for each support point attributes can be set. With attributes special actions can be triggered, e.g.:
- Spot turn (turn vehicle on a point)
- Stop distance (possibility to stop the vehicle inside a segment instead of at its end only)
- Offset driving (in order to prevent a driveway to get worn from the highly accurate automatic driving the vehicle can be navigated with offsets to the track)
- Inverted steering (special case for when omnidirectional vehicles need to steer into a particular direction at certain points of a track)
- Switching between the positioning systems at certain parts of a track (e.g. transponder and GPS)